
I'm Zewdie Habtie ,
I am an erasmus master's graduate in intelligent field robotics systems who enjoys delving into the application of robotics in our daily life.
About me


Zewdie Habtie Sisay is an Erasmus Mundus Joint Master's Scholar in Intelligent Field Robotic Systems at Universitat de Girona, Spain, and Eötvös Loránd University, Hungary. His research interests span a diverse range of cutting-edge disciplines, including robotics, computer vision, and deep(machine) learning.
He is passionate about exploring the intersection of these fields to push the boundaries of technology and create innovative solutions that address complex real-world challenges.
Technical Skills
ROS & ROS2
Intermediate
C++
Proficient
Python
Proficient
Pytorch
Intermediate
MATLAB
Basic skills
Gazebo
Intermediate
OpenCV
Basic skills
ReactJs
IntermediateEducation
Universita de Girona, Spain & ELTE, Hungary, 2025
IFRoS is aimed at a new generation of engineers who will develop new applications and tools to expan...read more

Master's in Computer Engineering
Bahir Dar University, Ethiopia, 2022
Completed Master's degree in Computer Engineering with focus in Computer vision, and Machine learnin...read more
Master's in Computer Engineering
Universita de Pisa, Italy, 2018 (not completed)
The MSc provides a solid and in-depth education that enables its graduates to design, develop, analy...read more
BSc in Computer Science & Engineering
Mekelle Institute of Technology, Ethiopia, 2016
Mekelle Institute of Technology(MIT) is an educational institute created in Mekelle, the capital of ...read more
My Projects
1
Stüabli TX60 - parts assembly
This project consists in the programming of the Stäubli TX60 Robot to develop a simplified robot man...read more
2
Stüabli TS60 Scara - Pick and Place
This project is about programming the Stäubli TS60 Scara robot for Pick-and-pace activities that inc...read more
3
Kinematic Control of a 4-DOF Mobile Manipulator
The project aimed to design and implement a kinematic control system for a mobile manipulator ...read more
4
Moving a Robot to a Goal Position using RL
The goal of this proejct was to implement the Reinforcement learning algorithm to learn a policy tha...read more

5
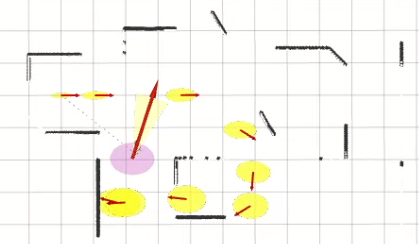
Frontier-Based Exploration Algorithm with RRT* and DWA
This project presents an autonomous exploration approach using Frontier-Based Exploration, RRT* for ...read more
6
Camera Pose estimation using Feature Matching
This project presents an estimation of camera pose using feature matching on images taken from a fla...read more
7
Pose-Based EKF SLAM using NDT Registration
This is project is about Pose-Based EKF SLAM(Simultaneous Localization and Mapping) using the NDT(No...read more

8
Autonomous outdoor GPS waypoint navigation
This project implements GPS waypoint navigation in an outdoor environment using Odoemtry, and magnet...read more
Get in touch
Let's talk
I am currently available to take on new projects, so feel free to send me anything you want me to work on.

zewdiehabie26@gmail.com

+34 610 281 153

Barcelona, Spain